

产品详情

焊接机器人简介
1、工业机器人技术作为先进制造技术的典型代表和主要技术实施手段,在提高产品质量、提高生产效率、改善工作环境、提高自动化程度等方面发挥了重要的作用。
2、机器人系统集成是以工业机器人为核心单元,结合先进的焊接设备、先进的焊接工艺技术以及系统工程技术,以其应用范围广泛、工艺灵活多样、加工产品精度高、质量稳定、自动化程度高、柔性化和智能化等诸多优点,正越来越被各行业广泛使用,成为现代焊接业的重要组成部分。
焊接机器人的主要优势

合理的解决方案,可有效的提高焊接生产效率可保证焊接工艺的稳定和一致性,确保焊接质量稳定可控
机器人系统集成技术成熟,系统运行可靠性高,设备故障率低机器人于工件实施联动以及机器人之间的协同工作,可确保适合的焊接姿态,并可根据工件的特殊状况实时调整焊接工艺参数,以得到的焊接质量,并减小工件焊后变形
易于实现焊接生产线的自动化,具备很强的柔性,适应企业产品换型
减轻工人的劳动强度,改善工作环境
增强企业生产管理的计划性和预见性
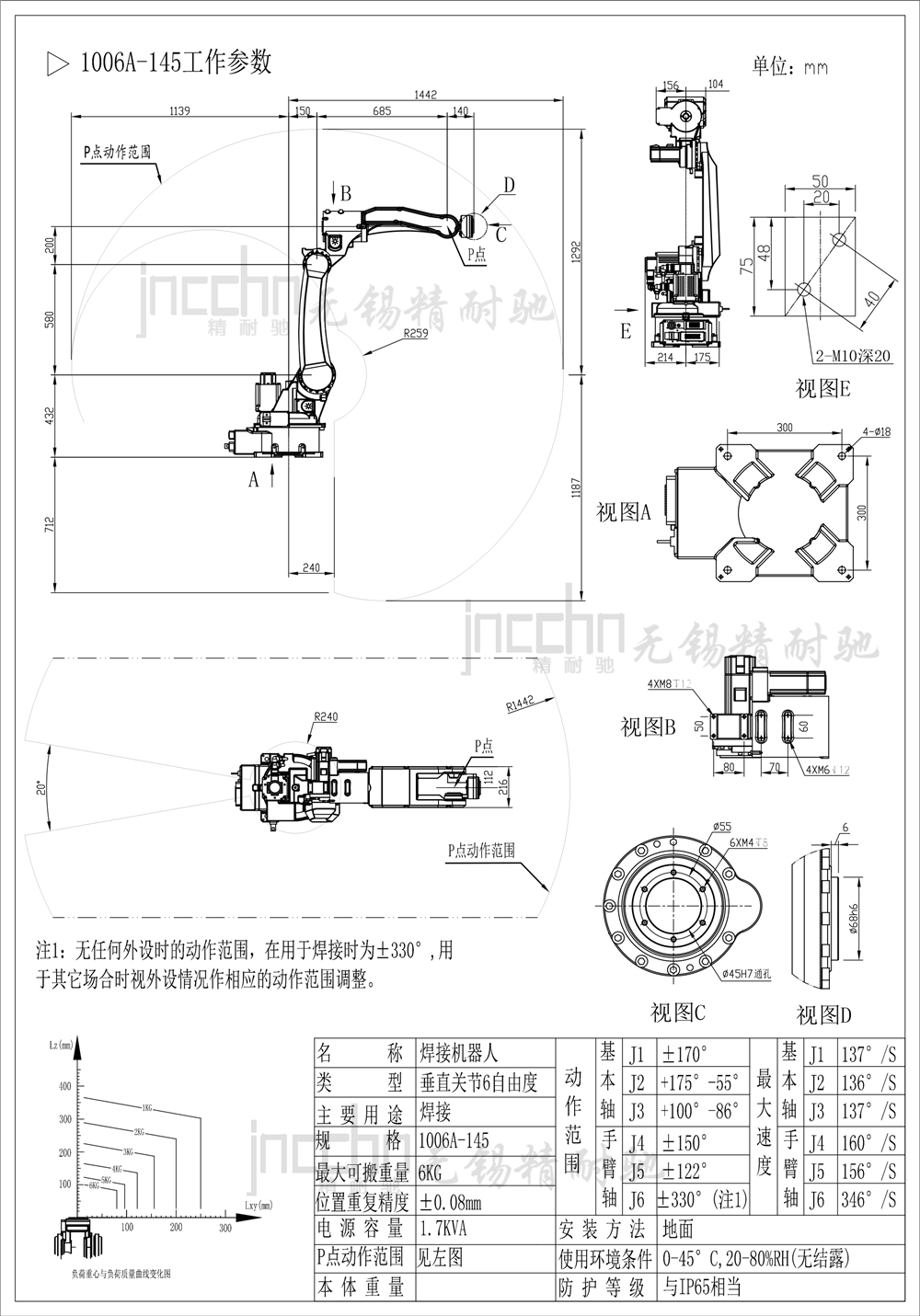
焊接机器人性能参数
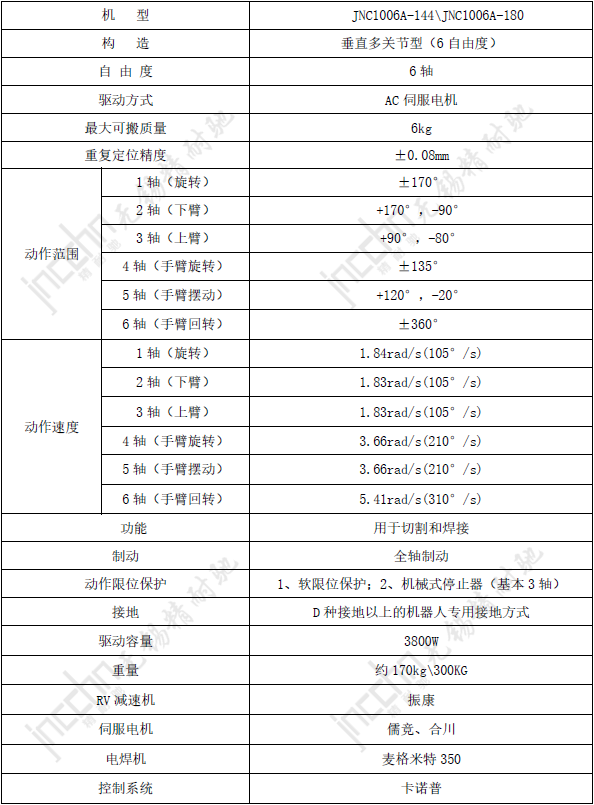
焊接机器人工作参数
焊接机器人的组成及特点
焊接机器人主要包括机器人和焊接设备两部分
机器人由机器人本体和控制柜(硬件及软件)组成。弧焊装备由焊接电源、送丝机、焊枪等部分组成。
绝大部分焊接机器人有6个轴,其中1、2、3轴可将末端焊枪送到不同的空间位置,而4、5、6轴解决焊枪姿态的不同要求
弧焊机器人为低负载机器人,一般负载为3-10kg
运行速度快,减少非工作时间
重复精度高,一次试教后可在保证焊接位置精度情况下重复工作
通过控制软件编程可实现多种焊枪运动方式,如摆动焊接,多层多道焊接等
接触寻位、自动寻找焊缝起点位置、电弧跟踪及自动再引弧功能
机器人系统一般可外接控制多个外部轴协调运动,以扩展焊接空间、获得合适的焊接位置和焊接姿态
机器人焊接常用设备和装置
各类精密变位机
各类机器人安装扩展设备
工件定位夹紧装置
清枪剪丝设备
适合机器人焊接的要求
工件尺寸和焊缝间隙一致性较好
对产品焊缝外观、精度要求较高的情况
形成一定批量生产的产品
批量小、但品种较多,换型较快,未来产品不确定性
焊缝形式多样、传统专机难于焊接的产品

上一篇:没有了!
下一篇:TKB1400工业机器人
下一篇:TKB1400工业机器人

最新动态

机器人焊接夹具驱动方式有哪些
2021-08-02
机器人焊接变位机及工装夹具对焊接的…
2021-01-04
焊接机器人不同的技术所要事项不同
2020-12-11
焊接机器人编程要考虑位置和焊枪姿态
2020-12-08
焊接机器人提高产品质量
2020-11-30
焊接机器人设置了先进的防水插口
2020-11-28
焊接机器人与变位机协作操作可提高质量
2020-11-25
焊接机器人加工4大优势
2020-11-20
焊接机器人主要流行示教编程
2020-11-16
焊接机器人控制方法和主要流程
2020-11-13
焊接机器人的作业场所采纳安全方法
2020-11-09
焊接机器人飞溅过多可能为焊丝外伸长…
2020-11-07
焊接机器人可以在恶劣环境工作
2020-11-03
焊接机器人还要用到焊接工装夹具
2020-10-30
焊接机器人分为三大部分
2020-10-28